次世代MEMS 2026-2036年:市場、技術、プレーヤーNext-Generation MEMS 2026-2036: Markets, Technologies, and Players 慣性センシング、重量測定、スピーカー技術における新たなMEMSイノベーション。プレーヤーカバレッジ、性能ベンチマーク、競合技術を含む詳細な10年市場予測。 MEMSは150億米ドルの産業であり... もっと見る

サマリー
慣性センシング、重量測定、スピーカー技術における新たなMEMSイノベーション。プレーヤーカバレッジ、性能ベンチマーク、競合技術を含む詳細な10年市場予測。
MEMSは150億米ドルの産業であり、市場は成熟している。次に来るものは?
微小電気機械システム(MEMS)とは、電気部品と機械部品を微視的なスケールで組み合わせたデバイスである。この包括的な用語には、同様に幅広い用途に使用される膨大な数のデバイスが含まれる。自動車の衝突を検知するエアバッグセンサー、インクジェットプリントヘッド、RFセンサー、マイクロフォン、圧力センサーなどは、成熟したMEMSのほんの一例に過ぎない。MEMSは幅広いカテゴリーに分類されるが、その製造プロセスによって統一されており、一般的には半導体産業で見られるようなシリコンウエハーへのバルク加工プロセスを採用している。この150億米ドルの産業は多くの分野で成長し成熟期に達しているが、MEMSの次の大きな飛躍となる可能性のある技術にはどのようなものがあるのだろうか。
IDTechExによる本レポートでは、業界を破壊する準備を進めている最先端の次世代MEMS技術に焦点を当て、3つの主要分野に焦点を当てている:
各セクションでは、基盤技術だけでなく、主要プレーヤー、既存の選択肢、ライバルとなる破壊的技術、市場ダイナミクス、きめ細かな市場予測を網羅し、これらの新興分野を包括的にカバーしている。
先進MEMS IMU 慣性計測ユニット(IMU)は、現代のナビゲーションシステムに不可欠なセンサーです。人工衛星や飛行機に求められるハイエンドの精度要求から、最新のスマートフォンの基本的なジェスチャー制御ユニットまで、IMUは加速度と角速度のデータを統合することで、正確な位置追跡と測位を可能にします。現在、MEMSジャイロスコープ(角速度センシングコンポーネント)は、オールMEMS IMUの性能を制限し、メーカーはより複雑な代替技術(光ファイバージャイロスコープなど)に頼らざるを得ません。このレポートでは、オール MEMS ナビゲーショングレードの IMU を実現する可能性のある新たな MEMS ジャイロ設計と、それが業界とナビゲーション全体にとってどのような意味を持つかを説明します。
MEMS重力計一般的に重力は9.8m/s2と見積もられていますが、実際の値は大きく異なります。地下に埋もれた資産、空洞、資源はすべて重力の局所的な値を変化させ、重力のわずかな偏差を監視する能力がセンシングの新たな次元を切り開く可能性がある。重力は加速度であるため、極めて精密な加速度計を使えば、非常に正確な重力場のローカル値を得ることができる。IDTechExは、このようなセンサーの本質的な「ノイズフロア」を減らすことに焦点を当てている。Geometric Anti-springs(GAS)の使用は、人工的にバネを柔らかくする商業的な牽引力を得ている新しいアプローチであり、重力波検出で最初に開拓された。IDTechExはまた、様々なプロトタイプをベンチマークし、MEMS重力計のプレーヤーの状況と商業的応用可能性を検証します。
MEMSスピーカー家電製品は数十年にわたりMEMS技術革新の温床となってきました。より小さく、より効率的で、より安価なコンポーネントを求めて、スマートフォンにはMEMSマイクロフォン、加速度計、ジャイロスコープが採用されている。
次はスピーカー・ドライバーかもしれない。従来のスピーカー・ドライバーは、永久磁石コイルと振動板を手作業で組み立てる必要があり、手間がかかるだけでなく、小型化できるサイズも限られていた。
MEMSスピーカーは、MEMSマイクロフォンの道を辿り、コンシューマー・エレクトロニクス市場を支配するようになるのだろうか?音の基本的な物理学が小さな直径から大きな音量を生み出すことを困難にしているためである。このレポートでは、超音波振幅変調を含むいくつかのアプローチを分解し、可聴周波数帯域全体でSPL(音圧レベル、音量)を比較しながら、12種類のMEMSスピーカーモデルをベンチマークし、モデルの性能に大きな違いがあることを明らかにしている。
 大手企業と小規模新興企業の混在
既存のMEMSの状況は、年間数十億ユニットを生産するボッシュ・センサーテックのような大手企業が大部分を占めている。MEMSは規模の経済から多大な恩恵を受けているが、だからといって中小企業がこの分野に参入できないわけではない。多くの新興企業はファブレス・モデルを採用しており、コア・システムの設計は社内で行うが、製造はサードパーティ(TSMCなど)に委託している。特にMEMSスピーカーの分野では、小規模なファブレス新興企業が大半を占めている。
ハイエンドの慣性センサー市場は、民生用MEMSとは異なり、航空宇宙大手によって支配されている。ハネウェル、ノースロップ・グラマン、サフランが慣性センサーの「ビッグ3」を構成し、航空機、衛星、防衛用途のセンサー製造に注力している。
CSWaPの重要性
CSWaP(コスト、サイズ、重量、消費電力)は、最適化しなければならない重要な性能マトリックスの1つである。MEMSシステムに移行するためには、CSWaPに悪影響を与えない方法で、既存技術を上回る性能を実証する必要がある。
市場展望
IDTechExは、ハイエンド慣性センサー(RLG、HRG、FOG、MEMS/Advanced MEMS)、MEMS重量計、MEMSスピーカーの出荷台数と市場金額の両方について、きめ細かな10年予測を提供している。次世代MEMS市場を分解すると、慣性センシングと民生用電子機器に大きな成長機会があることがわかる。
主な内容
本レポートは、新興および次世代MEMS技術とアプリケーションに関する重要な市場情報を提供します。
MEMSの背景と技術、業界概要のレビュー。
ハイエンド慣性計測ユニット(IMU)
MEMS speaker drivers
目次1. エグゼクティブサマリー
1.1. MEMS エグゼクティブサマリー
1.2. MEMS とは
1.3. MEMS の分類
1.4. レポートの範囲 (1)
1.5. レポートの範囲 (2)
1.6. 慣性計測ユニット(IMU):概要
1.7. IMU のアプリケーショングレード
1.8. IMU 市場の状況
1.9. ハイエンドIMU市場は「ビッグ3」が支配
1.10. 加速度センサーのアプリケーション展開
1.11. ジャイロスコープの展開進化
1.12. 世界的な国防費の増加
1.13. ハイエンドIMU市場の予測
1.14. IMU市場における長期的な機会
1.15. なぜMEMSスピーカードライバへ移行するのか
1.16. MEMSスピーカーの変換方式の概要
1.17. 一般化されたMEMSスピーカー変換方式の要約
1.18. MEMSスピーカー産業の概要
1.19. 周波数応答のベンチマーク
1.20. MEMSスピーカーのアドレッサブル市場
1.21. MEMSスピーカーの市場予測概要 (1)
1.22. MEMSスピーカーの市場予測概要 (2)
1.23. IDTechEx サブスクリプションでさらにアクセス
2. MEMS産業の概要
2.1. MEMS とは
2.2. MEMS の分類
2.3. レポートの範囲 (1)
2.4. レポートの範囲 (2)
3. 慣性航法システム
3.1. 慣性計測ユニット(IMU):概要
3.2. INS技術の全体像
3.3. IMU のアプリケーショングレード
3.4. IMU の主な用途
3.5. IMU 市場の状況
3.6. ハイエンドIMU市場は「ビッグ3」が支配
3.7. デッドレコニングによる航法
3.8. ドリフトの蓄積
3.9. ドリフト蓄積の例
3.10. MEMSは高コストになりうる
3.11. GNSSが使えない環境下での航法
3.12. MEMSの競合として台頭する量子センサー
3.13. IMUの分類まとめ
4. MEMS加速度計
4.1. MEMS加速度計の概要
4.2. 加速度計のアプリケーション展開
4.3. 航法用加速度計
4.4. 重力測定(グラビメトリ)
4.5. 地球物理調査のための重力測定
4.6. 既存の商用重力計
4.7. 重力測定ベースの航法
4.8. 地震計測/振動監視
4.9. 加速度計アプリケーションの要約
4.10. 加速度計の性能指標
4.11. 加速度計の性能向上のための手法
4.12. MEMS質量ばね型加速度計
4.13. 変位検出型MEMS加速度計
4.14. 横型櫛型容量加速度計
4.15. 平面型櫛型容量加速度計
4.16. クローズドループ加速度計
4.17. 単振動とシステム減衰
4.18. ばね質量系における加速度計のノイズ
4.19. 幾何学的アンチスプリング加速度計
4.20. GAS設計(1)
4.21. 幾何学的アンチスプリング(GAS)設計(2)
4.22. GAS加速度計の読み出し方式
4.23. GAS重力計のベンチマーク
4.24. GAS MEMSにおける課題
4.25. Innoseisセンサー技術、月へ向かう
4.26. MEMS共振ビーム加速度計
4.27. 共振型加速度計
4.28. VBAにおける差動センシング
4.29. シリコン製マイクログラビティVBA
4.30. チップスケールMEMS重力計にはジンバルが必要
4.31. MEMSサーマル加速度計
4.32. サーマルMEMS加速度計
4.33. MEMSIC
4.34. シリコンフォトニック光学MEMS加速度計
4.35. ささやきギャラリーモード共振器
4.36. 次世代MEMS加速度計の業界展望
4.37. 業界概要
4.38. 新型MEMS加速度計の業界展望
4.39. 原子干渉計ベースの量子重力計の動作原理
4.40. MEMS重力計の予測サマリー
4.41. MEMS重力計の出荷台数
4.42. MEMS重力計の市場価値
5. MEMSジャイロスコープ
5.1. MEMSジャイロスコープの概要(1)
5.2. MEMSジャイロスコープの概要(2)
5.3. ジャイロスコープ技術の全体像
5.4. ジャイロスコープ市場の状況
5.5. ジャイロスコープの性能指標
5.6. リングレーザー・ジャイロスコープ
5.7. 光ファイバー・ジャイロスコープ
5.8. 半球共振ジャイロスコープ(HRG)
5.9. AIRS - 究極のジャイロ性能
5.10. MEMSジャイロスコープ
5.11. コリオリ振動ジャイロスコープ
5.12. CVG(振動ジャイロ)の音叉型実装
5.13. 新たな振動型ジャイロ構造の台頭
5.14. 高性能MEMSジャイロスコープの進化
5.15. しかし、RLGおよびHRGは依然として性能優位
5.16. MEMSジャイロスコープの次の展開は
5.17. MEMSジャイロスコープの性能向上へのアプローチ
5.18. MEMSジャイロスコープにおけるノイズ
5.19. MEMSジャイロの絶縁パッケージング
5.20. 新興MEMSジャイロの特許動向
5.21. μHRG(マイクロ・半球共振ジャイロ)
5.22. MEMS HRG(半球共振ジャイロ)
5.23. μHRG製造へのアプローチ
5.24. マイクロスケールガラスブローイング
5.25. ブロートーチによる成形および堆積
5.26. μHRG向けの3Dプリンティング(PμSL)
5.27. Magneton AUスパッタリング
5.28. μHRG用の材料
5.29. μHRG製造の概要
5.30. μHRG製造手法のまとめ
5.31. μHRGに関する特許動向
5.32. 中国企業の特許での存在感
5.33. μHRGにおける商業活動
5.34. μHRGはMEMSジャイロスコープに大きな飛躍をもたらす
5.35. IMUの主要な用途
5.36. 高性能MEMSジャイロスコープの用途
5.37. 高性能MEMSジャイロに市場はあるのか
5.38. 競合として登場する量子ジャイロスコープ
6. IMU予測
6.1. IMU予測サマリー
6.2. 世界的な国防支出の増加
6.3. 自律走行車におけるIMU需要
6.4. ヒューマノイドロボティクス
6.5. ジャイロスコープの展開の進化
6.6. ジャイロスコープ技術の市場シェア
6.7. IMU予測(2025〜2036年)(1)
6.8. IMU予測(2025〜2036年)(2)
6.9. IMU予測(2025〜2036年)(3)
6.10. IMU市場における長期的な機会
7. MEMSスピーカー
7.1. MEMSスピーカー:エグゼクティブサマリー
7.2. 可聴周波数範囲
7.3. MEMSマイクロフォン
7.4. MEMSマイクの普及
7.5. 既存のスピーカードライバ
7.6. なぜMEMSドライバへ移行するのか
7.7. MEMSスピーカーの課題
7.8. ドライバサイズの違い:従来型 vs MEMS
7.9. MEMSスピーカーの変換方式の概要
7.10. 一般化されたMEMSスピーカー変換方式のまとめ
7.11. 振動膜材料の選択肢
7.12. 膜材料の重量と剛性
7.13. 剛性対重量比と減衰
7.14. MEMSにおける材料選定の違い
7.15. MEMSの課題に対するソリューション
7.16. 圧電MEMSスピーカー
7.17. 圧電型トランスデューサ
7.18. 圧電材料
7.19. 圧電材料は他の材料より重い
7.20. 圧電材料の薄膜成膜
7.21. USoundによる大音圧(SPL)達成へのアプローチ
7.22. 静電MEMSスピーカー
7.23. 静電型トランスデューサ
7.24. 超音波振幅変調
7.25. Boschによるナノスケール静電駆動
7.26. 電磁式および熱音響MEMSスピーカー
7.27. 電磁/電動型トランスデューサ
7.28. 熱音響トランスデューサ
7.29. 業界の展望
7.30. MEMS業界の展望 (1)
7.31. MEMS業界の展望 (2)
7.32. MEMS企業とファウンドリパートナー
7.33. MEMS企業とODMパートナー
7.34. MEMSスピーカー企業と商業パートナー (1)
7.35. MEMSスピーカー企業と商業パートナー (2)
7.36. MEMSスピーカーのベンチマーク
7.37. 周波数応答とハーマンカーブ
7.38. その他の性能指標
7.39. MEMSスピーカーの帯域幅
7.40. 周波数応答のベンチマーク
7.41. MEMSスピーカーとハーマンカーブ
7.42. 共振周波数と分裂周波数
7.43. 共振周波数のベンチマーク
7.44. 音圧レベル(SPL)と振動膜面積
7.45. 圧電MEMSの新興用途
7.46. 圧電MEMSによるアクティブ熱管理
7.47. アクティブ冷却 vs 熱伝導材料(TIM)
7.48. 市場予測
7.49. MEMSスピーカーのアドレッサブル市場
7.50. MEMSスピーカーの市場予測 (1)
7.51. MEMSスピーカーの市場予測 (2)
7.52. MEMSスピーカーの市場予測 (3)
7.53. MEMSスピーカーの市場予測 (4)
8. 市場予測
8.1. MEMS重力計の市場予測(出荷台数)
8.2. MEMS重力計の市場価値
8.3. ジャイロスコープ技術の市場シェア
8.4. IMU予測(2025〜2036年)(1)
8.5. IMU予測(2025〜2036年)(2)
8.6. IMU予測(2025〜2036年)(3)
8.7. IMU市場における長期的な機会
8.8. MEMSスピーカーのアドレッサブル市場
8.9. MEMSスピーカーの市場予測 (1)
8.10. MEMSスピーカーの市場予測 (2)
8.11. MEMSスピーカーの市場予測 (3)
8.12. MEMSスピーカーの市場予測 (4)

Summary
Emerging MEMS innovations in inertial sensing, gravimetry, and speaker technology. Granular 10-year market forecasts with player coverage, performance benchmarking, and competing technologies.
MEMS is a US$15 billion industry with mature markets. What comes next?
Microelectromechanical systems (MEMS) are devices that combine electrical and mechanical components on a microscopic scale. This umbrella term includes a vast array of devices that serve an equally wide array of applications. Airbag sensors that detect when a vehicle crashes, inkjet printheads, RF sensors, microphones, and pressure sensors are just a small sample of mature MEMS. While a broad category, MEMS are unified by their manufacturing process, which typically employs the same bulk-fabrication processes onto silicon wafers as seen in the semiconductor industry. This US$15 billion industry has grown and reached maturity in many sectors, but what are the technologies on the horizon that could be the next big leap forward for MEMS?
This report by IDTechEx focuses on the cutting-edge next-generation MEMS technologies that are preparing to disrupt the industry, highlighting 3 key areas:
In each section, the underlying technology is covered as well as key players, incumbent options, rival disruptive technologies, market dynamics, and granular market forecasts provide comprehensive coverage of these emerging sectors.
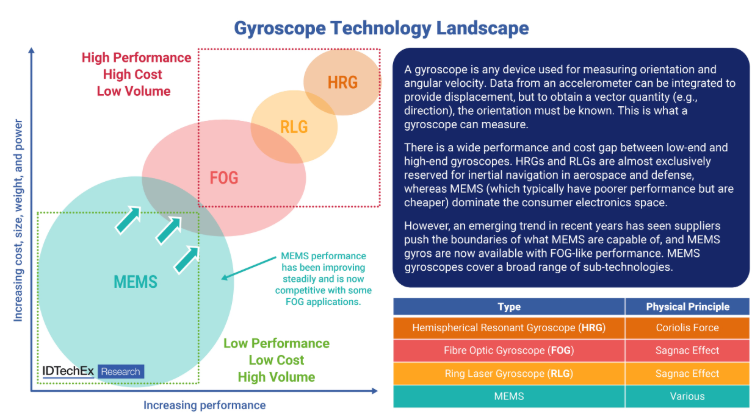
Advanced MEMS IMUs. Inertial Measurement Units (IMUs) are sensors that are integral to modern-day navigational systems. From the high-end precision demands of satellites and planes all the way to basic gesture control units in modern smartphones, IMUs allow precise location tracking and position by integrating acceleration and angular rate data. Currently, MEMS gyroscopes (the angular rate sensing component) limit all-MEMS IMU performance and force manufacturers to rely on alternative, more complex technologies (such as fiber optic gyroscopes). This report breaks down emerging MEMS gyro designs that could unlock an all-MEMS navigational-grade IMU, and what this would mean for the industry and navigation as a whole.
MEMS Gravimeters Although gravity is typically quoted as 9.8 m/s2, the true value varies significantly. Buried underground assets, cavities, and resources all alter the local value of gravity, and the ability to monitor tiny deviations in gravity could unlock a new dimension to sensing. Gravity is acceleration, so an extremely precise accelerometer can provide a highly accurate local gravitational field value. The challenge has been reducing the intrinsic 'noise-floor' of such sensors, and IDTechEx focuses on the key enabling technologies to reduce this noise-floor. The use of Geometric Anti-springs (GAS) is an emerging approach gaining some commercial traction that artificially softens the springs and was first pioneered in gravitational wave detection. IDTechEx also benchmarks various prototypes and examines the player landscape and commercial applicability of MEMS gravimeters.
MEMS Speakers. Consumer electronics have been a hotbed for MEMS innovation for decades. The desire for smaller, more efficient, cheaper components has led to the adoption of MEMS microphones, accelerometers, and gyros within smartphones. The
speaker driver could be next. Conventional speaker drivers require manual assembly of permanent magnet coils and diaphragms, which is not only labor-intensive but also limits the size to which speaker drivers can be miniaturized.
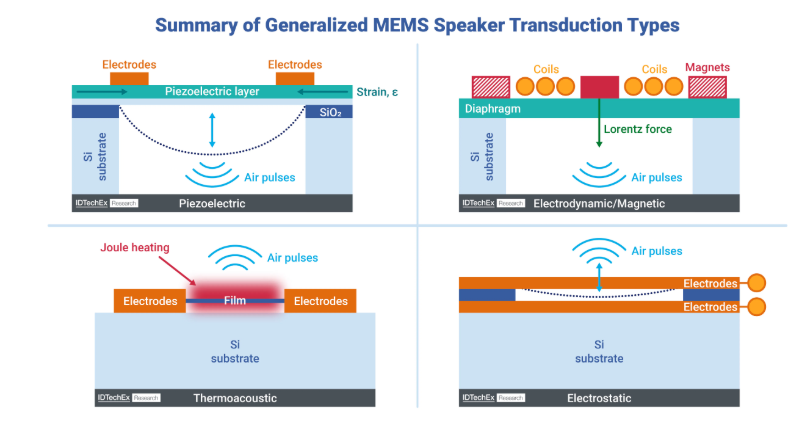
Will MEMS speakers follow the path of MEMS microphones and come to dominate the consumer electronics market? A key barrier to overcome has been the performance of MEMS speaker chips at low frequencies, as the fundamental physics of sound makes producing a large volume from a small diameter challenging. This report breaks down several approaches, including ultrasonic amplitude modulation, and then benchmarks a dozen different MEMS speaker models, comparing SPL (Sound Pressure Level, volume) across the audible frequency band, revealing large differences in model performance.
A mix of big players and small startups
The existing MEMS landscape is largely dominated by major companies such as Bosch Sensortech who produce billions of units a year. MEMS benefit enormously from economies of scale, but this does not mean smaller companies cannot enter the space. Many startups adopt a fabless model, where core system design is conducted in-house but fabrication is externalized to a 3rd party (such as TSMC). The MEMS speaker landscape, in particular, is dominated by small fabless startups.
The high-end inertial sensor market is different from consumer MEMS in that it is dominated by aerospace majors. Honeywell, Northrop Grumman, and Safran comprise the 'big-3' in inertial sensing, focused on producing sensors for aircraft, satellites, and defense applications.
The importance of CSWaP
CSWaP (Cost, Size, Weight, and Power) is one of the key performance matrices that must be optimized. To shift to a MEMS system, performance over the incumbent technology must be demonstrated in a manner that does not adversely affect the CSWaP.
Market outlook
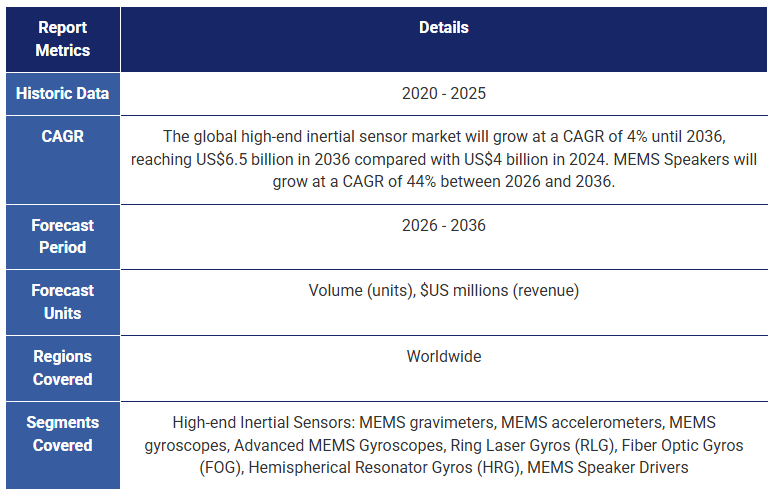
IDTechEx provides granular 10-year forecasts for high-end inertial sensors (RLG, HRG, FOG, MEMS/Advanced MEMS), MEMS gravimeters, and MEMS speakers, both for unit shipments and market value. Breaking down the next-generation MEMS market reveals substantial opportunities for growth in inertial sensing and consumer electronics.
Key Aspects
This report provides critical market intelligence about emerging and next-generation MEMS technologies and applications.
A review of the context and technology MEMS and an industry overview.
High-end inertial measurement units (IMUs)
MEMS speaker drivers
Table of Contents1. EXECUTIVE SUMMARY
1.1. MEMS Executive Summary
1.2. What are MEMS?
1.3. MEMS Categorization
1.4. Report Scope (1)
1.5. Report Scope (2)
1.6. Inertial Measurement Units (IMUs): An introduction
1.7. Application Grades of IMUs
1.8. IMU Market Landscape
1.9. High-End IMU Market is Dominated by the Big-3
1.10. Accelerometer Application Landscape
1.11. Gyroscope Landscape Evolution
1.12. Defense Spending Rises Globally
1.13. High-end Inertial Measurement Unit Forecast
1.14. Long-term Opportunities in the IMU Market
1.15. Why Shift to MEMS Speaker Drivers?
1.16. Overview of MEMS Speaker Transduction Types
1.17. Summary of Generalized MEMS Speaker Transduction Types
1.18. MEMS Speaker Industry Overview
1.19. Frequency Response Benchmarking
1.20. Addressable Markets for MEMS Speakers
1.21. MEMS Speaker Forecasting Overview (1)
1.22. MEMS Speaker Forecasting Overview (2)
1.23. Access More With an IDTechEx Subscription
2. MEMS INDUSTRY OVERVIEW
2.1. What are MEMS?
2.2. MEMS Categorization
2.3. Report Scope (1)
2.4. Report Scope (2)
3. INERTIAL NAVIGATION SYSTEMS
3.1. Inertial Measurement Units (IMUs): An introduction
3.2. INS Technology Landscape
3.3. Application Grades of IMUs
3.4. IMU Key Applications
3.5. IMU Market Landscape
3.6. High-End IMU Market is Dominated by the Big-3
3.7. Navigation by Dead Reckoning
3.8. Drift Accumulation
3.9. Example Drift Accumulation
3.10. MEMS Can be High-Cost
3.11. Navigation in GNSS Denied-Environments
3.12. Quantum Sensors Emerging as Competition for MEMS
3.13. IMU Breakdown Summary
4. MEMS ACCELEROMETERS
4.1. MEMS Accelerometers Overview
4.2. Accelerometer Application Landscape
4.3. Accelerometers for Navigation
4.4. Gravimetry
4.5. Gravimetry for Geo-Physical Surveying
4.6. Incumbent Commercial Gravimeters
4.7. Gravimetry-Based Navigation
4.8. Siesmometry/Vibration Monitoring
4.9. Summary of Accelerometer Applications
4.10. Performance Metrics of an Accelerometer
4.11. Routes to Improving Accelerometer Performance
4.12. MEMS Mass-Spring Accelerometers
4.13. Displacement Based MEMS Accelerometers
4.14. Transverse Comb Capacitive Accelerometer
4.15. Lateral Comb Capacitive Accelerometer
4.16. Closed Loop Accelerometers
4.17. Simple Harmonic Motion and System Damping
4.18. Accelerometer Noise in Spring-Mass Systems
4.19. Geometric Anti-Spring Accelerometers
4.20. GAS Design (1)
4.21. Geometric Anti-Spring (GAS) Design (2)
4.22. GAS Accelerometers Readout Options
4.23. GAS Gravimeters Benchmarking
4.24. Challenges with GAS MEMS
4.25. Innoseis Sensor Technologies Heads to the Moon
4.26. MEMS Resonant Beam Accelerometers
4.27. Resonant Based Accelerometer
4.28. Differential Sensing in VBAs
4.29. Silicon Microgravity VBA
4.30. Chip-Scale MEMS Gravimeters Require Gimballing
4.31. MEMS Thermal Accelerometers
4.32. Thermal MEMS Accelerometers
4.33. MEMSIC
4.34. Silicon Photonic Optical MEMS Accelerometers
4.35. Whispering Gallery Mode Resonator
4.36. Next-Gen MEMS Accelerometers Industry Landscape
4.37. Industry Overview
4.38. MEMS Novel Accelerometers Industry Landscape
4.39. Operating principles of atomic interferometry-based quantum gravimeters
4.40. MEMS Gravimeter Forecast Summary
4.41. MEMS Gravimeters Units
4.42. MEMS Gravimeters Market Value
5. MEMS GYROSCOPES
5.1. MEMS Gyroscopes Overview (1)
5.2. MEMS Gyroscopes Overview (2)
5.3. Gyroscope Technology Landscape
5.4. Gyroscope Market Landscape
5.5. Performance Metrics for Gyroscopes
5.6. Ring Laser Gyroscopes
5.7. Fibre Optic Gyroscopes
5.8. Hemispherical Resonator Gyroscopes
5.9. AIRS - Ultimate Gyro Performance
5.10. MEMS Gyroscopes
5.11. Coriolis Vibratory Gyroscopes
5.12. CVG Tuning Fork Implementations
5.13. Emerging Vibratory Gyro Architectures
5.14. High-End MEMS Gyroscopes Improving...
5.15. But RLG and HRG Retain Performance Advantage
5.16. Where Next for MEMS Gyroscopes?
5.17. Routes to Improve MEMS Gyroscope Performance
5.18. Noise in MEMS Gyroscopes
5.19. Isolation Packaging for MEMS Gyros
5.20. Patent Landscape of Emerging MEMS Gyros
5.21. μHRG
5.22. MEMS HRG
5.23. Approaches to μHRG Manufacturing
5.24. Microscale Glassblowing
5.25. Blowtorch Blowing and Deposition
5.26. 3D Printing (PμSL) for μHRG
5.27. Magneton AU Sputtering
5.28. Materials for μHRG
5.29. Manufacturing Overview for μHRG
5.30. Summary of Manufacturing Methods for μHRG
5.31. Patent Landscape of μHRGs
5.32. Significant Chinese Player Presence in Patent Landscape
5.33. Commercial Activity in μHRGs
5.34. μHRG Offers a Significant Leap for MEMS Gyros
5.35. IMU Key Applications
5.36. High-end MEMS Gyros Applications
5.37. Is There a Market for High-End MEMS Gyros
5.38. Quantum Gyroscopes on the Horizon as Competition
6. IMU FORECASTS
6.1. IMU Forecast Summary
6.2. Defense Spending Rises Globally
6.3. IMU Demand Autonomous Vehicles
6.4. Humanoid Robotics
6.5. Gyroscope Landscape Evolution
6.6. Gyroscope Technology Market Shares
6.7. IMU Forecasts, 2025-2036 (1)
6.8. IMU Forecasts, 2025-2036 (2)
6.9. IMU Forecasts, 2025-2036 (3)
6.10. Long-term Opportunities in the IMU Market
7. MEMS SPEAKERS
7.1. MEMS Speakers Executive Summary
7.2. Audible Hearing Range
7.3. MEMS Microphones
7.4. Adoption of MEMS Microphones
7.5. Incumbent Speaker Drivers
7.6. Why Shift to MEMS Drivers?
7.7. Challenges with MEMS Speakers
7.8. Difference in Driver Size - Conventional Drivers vs MEMS
7.9. Overview of MEMS Speaker Transduction Types
7.10. Summary of Generalized MEMS Speaker Transduction Types
7.11. Membrane Material Choices
7.12. Weight and Stiffness of Membrane Materials
7.13. Stiffness-to-Weight Ratio and Damping
7.14. Material Selection Differs for MEMS
7.15. Solutions to MEMS Challenges
7.16. Piezoelectric MEMS Speakers
7.17. Piezoelectric Transducer
7.18. Piezoelectric Materials
7.19. Piezoelectric Materials Are Heavier than Alternatives
7.20. Thin Film Deposition of Piezoelectric Materials
7.21. USound's Approach to Achieving Larger SPL
7.22. Electrostatic MEMS Speakers
7.23. Electrostatic Transducer
7.24. Ultrasonic Amplitude Modulation
7.25. Nanoscopic Electrostatic Drive from Bosch
7.26. Electromagnetic and Thermoacoustic MEMS Speakers
7.27. Electrodynamic/Magnetic Transducer
7.28. Thermoacoustic Transducer
7.29. Industry Landscape
7.30. MEMS Industry Landscape (1)
7.31. MEMS Industry Landscape (2)
7.32. MEMS Players and Foundry Partners
7.33. MEMS Players and ODM Partners
7.34. MEMS Speaker Players and Commercial Partners (1)
7.35. MEMS Speaker Players and Commercial Partners (2)
7.36. MEMS Speaker Benchmarking
7.37. Frequency Response and Harman Curves
7.38. Other Performance Metrics
7.39. MEMS Speakers Bandwidth's
7.40. Frequency Response Benchmarking
7.41. MEMS Speakers and the Harman Curve
7.42. Resonance and Breakup Frequencies
7.43. Resonance Frequency Benchmarking
7.44. SPL and Diaphragm Area
7.45. Emerging Applications for PiezoMEMS
7.46. Active Thermal Management with Piezoelectric MEMS
7.47. Active Cooling vs TIM
7.48. Forecasting
7.49. Addressable Markets for MEMS Speakers
7.50. MEMS Speaker Forecasts (1)
7.51. MEMS Speaker Forecasts (2)
7.52. MEMS Speaker Forecasts (3)
7.53. MEMS Speaker Forecasts (4)
8. MARKET FORECASTS
8.1. MEMS Gravimeters Forecasts (Units)
8.2. MEMS Gravimeters Market Value
8.3. Gyroscope Technology Market Shares
8.4. IMU Forecasts, 2025-2036 (1)
8.5. IMU Forecasts, 2025-2036 (2)
8.6. IMU Forecasts, 2025-2036 (3)
8.7. Long-term Opportunities in the IMU Market
8.8. Addressable Markets for MEMS Speakers
8.9. MEMS Speaker Forecasts (1)
8.10. MEMS Speaker Forecasts (2)
8.11. MEMS Speaker Forecasts (3)
8.12. MEMS Speaker Forecasts (4)
ご注文は、お電話またはWEBから承ります。お見積もりの作成もお気軽にご相談ください。本レポートと同分野(半導体)の最新刊レポート
IDTechEx社の 半導体、コンピュータ、AI - Semiconductors, Computing & AI分野 での最新刊レポート
よくあるご質問IDTechEx社はどのような調査会社ですか?IDTechExはセンサ技術や3D印刷、電気自動車などの先端技術・材料市場を対象に広範かつ詳細な調査を行っています。データリソースはIDTechExの調査レポートおよび委託調査(個別調査)を取り扱う日... もっと見る 調査レポートの納品までの日数はどの程度ですか?在庫のあるものは速納となりますが、平均的には 3-4日と見て下さい。
注文の手続きはどのようになっていますか?1)お客様からの御問い合わせをいただきます。
お支払方法の方法はどのようになっていますか?納品と同時にデータリソース社よりお客様へ請求書(必要に応じて納品書も)を発送いたします。
データリソース社はどのような会社ですか?当社は、世界各国の主要調査会社・レポート出版社と提携し、世界各国の市場調査レポートや技術動向レポートなどを日本国内の企業・公官庁及び教育研究機関に提供しております。
|
|

