ヒューマノイドロボット2025-2035年:技術、市場、機会Humanoid Robots 2025-2035: Technologies, Markets and Opportunities ヒューマノイドロボット2025-2035年:Technologies, Markets and Opportunities 主要自動車産業とロジスティクス産業の10年間のヒューマノイドロボット市場予測、ヒューマノイドコンポーネント... もっと見る

サマリー ヒューマノイドロボット2025-2035年:Technologies, Markets and Opportunities 主要自動車産業とロジスティクス産業の10年間のヒューマノイドロボット市場予測、ヒューマノイドコンポーネント(バッテリー、アクチュエーター、モーター、ネジ、センサーなど)の10年間の市場予測。主要プレイヤー、ニュース、タイムライン、導入障壁。 ヒューマノイドロボットは、特に過去2年間のChatGPTのようなAIの進歩の急増を受け、「現実世界に具現化された人工知能」として広く認識されている。IDTechExの調査分析によると、この市場は、Apptronik、Agility Robotics、Unitree、Figure.AIなどの大手新興企業に多額の投資が流れ、関心が急増している。さらに、テスラ、シャオミ、メタなどの大手企業も人型ロボット分野への参入計画を発表している。 IDTechExのレポート「ヒューマノイドロボット2025-2035年:技術、市場、機会」では、アクチュエーター、モーター、減速機、ネジ、ベアリング、カメラ、LiDAR、レーダー、超音波センサー、触覚センサー、AI駆動ソフトウェア、バッテリー、高性能素材、エンドエフェクターを網羅し、コンポーネントレベルでの詳細な技術分析を提供している。本レポートでは、ヒューマノイドロボットの技術、既存のヒューマノイドロボット、設計と製造上の課題、ビジネスと規制上のハードル、将来の市場可能性について、特に自動車産業と物流産業における機会に焦点を当てながら包括的に考察しています。 本レポートの主な内容は以下の通りです:
産業用途: 2025年現在、ヒューマノイドロボットに対する大きな宣伝にもかかわらず、ヒューマノイドロボットが適合する現実のアプリケーションはまだ限られている。多くのOEMがヒューマノイドロボットを汎用機として販売しているが、IDTechExはターゲットとするユースケースを産業用と非産業用の2つに分類している。 Tesla Optimus、Agility RoboticsのDigit、UBTechのWalker Sのような産業用ヒューマノイドロボットは、一般的に重量が重く、大きなバッテリーパックを搭載しているのに対し、UnitreeのG1のような非産業用ヒューマノイドは、より軽量で、力・トルクの要件が低い研究や軽作業向けに設計されている。 産業用アプリケーションの中では、自動車や物流・倉庫分野が最も関心を集めている。短中期的(2030年以前)には、自動車産業がヒューマノイドの採用をリードすると予想されている。これは、歴史的な自動化の成功、大規模生産の需要、大量生産が必要なことによるコスト交渉力の強化といった要因によるものだ。テスラ、シャオミ、XPengなど、いくつかの自動車OEMがすでに独自のヒューマノイドロボットを開発している。人型ロボットと大きく重なるサプライチェーンが確立されているため、自動車メーカーは既存のリソースを活用してコストを削減できる。 テスラは5,000台のOptimusロボットを生産する計画を発表しており、生産とサプライチェーンの準備状況に応じて12,000台まで拡大する可能性がある。BYDは、2025年に1,500台のヒューマノイド・ロボットを導入し、2026年までに20,000台に拡大することを目標としている。メルセデス・ベンツ(Apptronikと提携)やBMW(Figure.AIとFigure 02で協業)など、他の大手自動車メーカーもヒューマノイド・ロボットの分野で躍進している。現在のサプライチェーンの状況からすると、非常にアグレッシブでやや非現実的と思われる目標もあるが、投資と急速な開発は、ヒューマノイドロボットの将来の可能性に対する業界の自信を浮き彫りにしている。 しかし、2025年現在、自動車セクターにおけるヒューマノイドはまだ初期のパイロットテスト段階にあり、主にバッジのラベル付け、マテリアルハンドリング、検査といった基本的な作業を行うにとどまっている。IDTechExのアナリストは、2026年から2027年にかけて、ヒューマノイドロボットは特定のユースケースで稼働し始め、2028年から2033年にかけて、より複雑なタスクへと徐々に拡大していくと予測している。これはまた、ヘルスケアなど産業以外の分野での一般用途のヒューマノイドロボットは、さらに先の話であることを意味する。 物流・倉庫業界も、ヒューマノイドの導入が期待されているが、その進捗は遅れている。2025年初頭の時点で、IDTechExは限られた数のパイロットプロジェクトしか観測しておらず、倉庫に配備されたヒューマノイドは100台に満たない。倉庫でのテストには通常18~30カ月かかることを考えると、2025年末までに大規模な採用(数千台規模)が行われる可能性は低い。さらに、倉庫業者はヒューマノイドロボットの投資対効果や投資回収期間を評価しなければならない。これらの理由から、IDTechExは、主に自動車産業におけるヒューマノイドの成功が実証されていることから、物流におけるヒューマノイドが軌道に乗り始めるのは2026年から2027年になると考えている。 とはいえ、IDTechExは、ヒューマノイドロボットの価格が20,000米ドル程度まで下がり、効率的に商品を運搬したり、基本的なピックアンドプレース作業を行ったりできるようになれば、関心が高まる可能性があると示唆している。現在、自律移動ロボット(AMR)や無人搬送車(AGV)とロボットアームを組み合わせて同じ機能を実現するには、2万米ドルを大幅に超えるコストがかかるため、ヒューマノイドロボットはこれら2つの機能を組み合わせた、より魅力的な選択肢となっている。 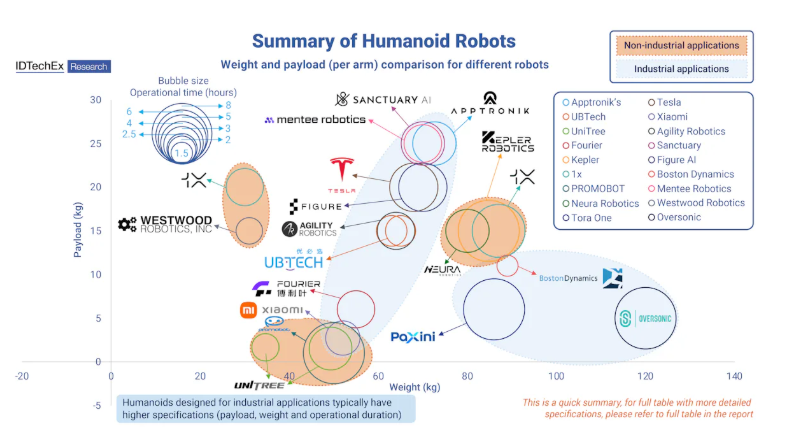 コンポーネントの課題: 2025年現在、人型ロボットの平均販売価格は依然として高い。例えば、テスラ・オプティマスの価格は12万~15万米ドルと推定されるが、これは高価なコンポーネントと生産台数の少なさが主な原因である。しかし、生産規模が拡大するにつれて、部品コストとヒューマノイド全体のコストは着実に低下していくとIDTechExは予測している。 また、部品レベルでもいくつかの技術的・製造的課題が残っている。主な課題は以下の通り:
結論 ヒューマノイドロボットは産業界への導入がまだ初期段階にあるとはいえ、特に自動車やロジスティクスの分野において、その市場潜在力は非常に大きい。多額の投資、技術の進歩、スケールメリットの増大により、今後10年間の急成長が期待される。IDTechExは、ヒューマノイドロボットの市場規模は2035年までに約300億米ドルに達するとみている。詳細はIDTechExの最新リサーチ「ヒューマノイドロボット2025-2035」に掲載されている:技術、市場、機会」をご覧ください。 主要な側面 本レポートは、ヒューマノイドロボットに関する重要な市場情報を提供し、その主な用途と各構成要素の技術的、規制的、商業的課題に焦点を当てています。内容は以下の通りです: 最先端のヒューマノイドのレビュー、対象産業、採用スケジュール
ヒューマノイドロボットの各ハードウェアコンポーネントの完全分析
全体を通しての市場規模予測とビジネスチャンス
 目次
1. 概要
1.1. ヒューマノイドロボットの課題と動向
1.2. 部品の選択 - コスト効率が鍵となるか?
1.3. 部品の動向 - モジュール性、効率的な材料、および電力効率
1.4. 動向:量産拡大と汎用タスクによるコスト削減
1.5. ヒューマノイドロボットの要約
1.6. 応用分野別ヒューマノイドロボットの商業化成熟度
1.7. ヒューマノイドロボットの主要ハードウェア部品の要約
1.8. アクチュエーター - 技術比較と課題
1.9. モータの要約
1.10. レデューサーのベンチマーク
1.11. 周辺環境を感知する3D視覚システム
1.12. 技術別触覚センサーのベンチマーク
1.13. 部品別コスト分析
1.14. ソフトウェアと機能の要約
1.15. 国別および主要な用途別ヒューマノイド市場
1.16. ロジスティクス業界におけるヒューマノイドロボットのメリットと課題
1.17. ロジスティクス業界でヒューマノイドロボットが処理するタスクの推定タイムライン
1.18. 自動車業界におけるヒューマノイドロボットのタスク:確立された応用と新興応用
1.19. BYDとテスラの人型ロボット展開の野心的な目標
1.20. 自動車業界における人型ロボットの技術的課題
1.21. 自動車業界における人型ロボットの商業的・規制上の課題
1.22. 自動車業界と物流業界における人型ロボットの市場規模と数量予測
1.23. 産業用ヒューマノイドロボットのバッテリー容量(GWh)予測:2025-2035
1.24. ヒューマノイドロボットのハードウェアコンポーネントの数量予測:2025-2035
1.25. ヒューマノイドロボットのハードウェアコンポーネントの市場規模予測:2025-2035
2. はじめに
2.1. ヒューマノイドロボットの概要
2.2. なぜヒューマノイドロボットなのか、そしてヒューマノイドロボットと特殊ロボットの違いは?
2.3. ヒューマノイドロボットの採用を加速している要因は?
2.4. ヒューマノイドロボットの採用を妨げる要因は?
2.5. 2040 年までに 10 億台以上のヒューマノイドロボット - イーロン・マスク氏のコメント
2.6. 急成長するヒューマノイドロボット業界
2.7. 主要企業がヒューマノイドロボット分野に参入
2.8. 重要なきっかけとなった出来事の概要
2.9. Cosmos と Nvidia の Isaac GR00T
2.10. 自動車業界とヒューマノイドロボット業界の相乗効果
2.11. コスト分析 - Optimus (1/2)
2.12. コスト分析 - Optimus (2/2)
2.13. パートナーシップと採用
3. 主要顧客と使用事例
3.1. 概要
3.1.1. ヒューマノイドロボットを採用する可能性が最も高い分野 (1/2)
3.1.2. ヒューマノイドロボットを採用する可能性が最も高い分野 (2/2) - 2024 年に急成長
3.1.3. 国別および主要な利用ケース別のヒューマノイド市場
3.1.4. 応用分野別ヒューマノイドロボットの商業化成熟度
3.1.5. ヒューマノイドロボットの要約(1/3)
3.1.6. ヒューマノイドロボットの要約(2/3)
3.1.7. ヒューマノイドロボットの要約(3/3)
3.2. 自動車産業
3.2.1. 自動車産業 - 協業事例(1/2)
3.2.2. 自動車産業 - 協業事例(2/2)
3.2.3. ヒューマノイドロボットと自動車OEM(1/2)
3.2.4. ヒューマノイドロボットと自動車OEM(2/2)
3.2.5. 自動車産業におけるヒューマノイドロボットの役割
3.2.6. 自動車 - UBTechの人型ロボットがBYDの材料搬送に活用
3.2.7. 自動車 - Nioが工場でのパイロット操作用にUBTechの人型ロボットを採用
3.2.8. ZeekrもNioに続き、工場にUBTechの人型ロボットを導入
3.2.9. Figure AIのFigure 02がBMWと協力
3.2.10. ApptronikのApolloとMercedes-Benz
3.2.11. 自動車産業におけるヒューマノイドロボットの役割:確立された応用と新興の応用
3.2.12. BYDとTeslaのヒューマノイド導入に関する野心的な目標
3.2.13. 自動車産業におけるヒューマノイドロボットの技術的課題
3.2.14. 自動車業界におけるヒューマノイドの商業的および規制上の課題
3.2.15. 自動車業界におけるヒューマノイドのチャンス
3.3. 物流業界
3.3.1. 物流業界におけるヒューマノイドロボットの紹介
3.3.2. 物流業界におけるヒューマノイドロボットのメリットと課題
3.3.3. Agility Robotics - 物流業界をリードするヒューマノイドロボットメーカー
3.3.4. 倉庫で使用されるヒューマノイドロボットの協力分野 - 安全性の課題
3.3.5. BYD - UBTech のヒューマノイドロボットによるラストマイル配送
3.3.6. GXO と Apptronik
3.3.7. Figure の Helix:物流におけるヒューマノイドロボット
3.3.8. 物流業界におけるヒューマノイドロボットが扱うタスクの推定スケジュール
3.4. ヒューマノイドロボット業界に関するニュースと関係者
3.4.1. メタがヒューマノイドロボット分野に参入
3.4.2. Nvidia のヒューマノイドロボット技術
3.4.3. Cosmos と Nvidia の Isaac GR00T
3.4.4. Apptronik がシリーズ A 資金調達で 3 億 5000 万米ドルを調達
4. 設計、製造、および商業的な課題
4.1. 課題の要約
4.1.1. 設計と製造の課題(1/3) - 要約
4.1.2. 設計と製造の課題(2/3) - 要約
4.1.3. 設計と製造の課題(3/3) - 要約
4.1.4. ヒューマノイドロボットの採用における商業的・社会的障壁
4.1.5. ヒューマノイドロボットの統合に関する課題
4.1.6. UniTree
4.1.7. Manus - モーショントラッキング用のハンドトラッキング用メタグローブ
4.2. 設計と製造の課題
4.2.1. 設計と製造の課題 - アクチュエーター(モーター + レデューサー)
4.2.2. 設計と製造の課題 - レデューサー
4.2.3. 設計および製造上の課題 - モーターおよび熱管理 (1/2)
4.2.4. 設計および製造上の課題 - モーターおよび熱管理 (2/2)
4.2.5. 設計および製造上の課題 - バッテリーおよび冷却
4.2.6. 設計、製造、および商業上の課題 - 触覚センサー
4.3. 規制および商業上の課題
4.3.1. 懸念事項:安全性、規制、およびデータプライバシー
4.3.2. 安全および規制要件を回避する方法 - 産業環境のための協力スペース
4.3.3. 投資収益率を証明する十分な証拠の欠如
4.3.4. ヒューマノイドロボットに関する地域規制
5. 部品レベルの分析
5.1. 概要
5.1.1. ヒューマノイドモデルの部品概要
5.1.2. ヒューマノイドロボットの重要な部品の概要
5.1.3. コンポーネント別のコスト分析
5.1.4. コンポーネントの概要 - Tesla Optimus
5.1.5. コンポーネントの概要 - Unitree G1
5.2. アクチュエータの概要
5.2.1. アクチュエータ - 概要
5.2.2. アクチュエータ - コンポーネントレベルでの分類
5.2.3. アクチュエータの分類:リニアとロータリー
5.2.4. 線形と回転アクチュエーターの利点と欠点
5.2.5. 線形と回転アクチュエーターの人型ロボットの関節への応用
5.2.6. アクチュエーターの分類:電気式、空気圧式、油圧式
5.2.7. アクチュエーターの技術的比較と課題
5.2.8. 駆動方式:直接駆動かギア駆動か
5.3. モータ
5.3.1. 電気モータはますます普及している
5.3.2. 異なるヒューマノイドロボット企業向けのモータの要約
5.3.3. 直接駆動モータ - フレームレスモータ
5.3.4. フレームレスモータ - 直接駆動アクチュエータまたはギアードアクチュエーションに使用可能
5.3.5. ブラシ付き/ブラシレスモータ
5.3.6. コアレスモーター - ブラシ付きモーターの一種
5.3.7. コアレスモーターの利点と欠点
5.3.8. モーターのまとめ
5.3.9. 事例:テスラ・オプティマスモーター
5.4. レデューサー
5.4.1. レデューサーの概要:ハーモニック、プラネタリー、RVレデューサー
5.4.2. 減速機のベンチマーク(1/2)
5.4.3. 減速機のベンチマーク(2/2)
5.4.4. ハーモニック減速機
5.4.5. ハーモニック減速機の設計、製造、材料に関する課題
5.4.6. RV減速機
5.4.7. RV減速機の設計、製造、材料に関する課題
5.4.8. プラネタリ減速機
5.4.9. プラネタリ減速機の熱管理課題
5.4.10. プラネタリ減速機の設計と製造課題
5.4.11. 事例:テスラ・オプティマス
5.5. ねじ
5.5.1. さまざまな種類のねじの概要
5.5.2. ボールねじ - 部品と技術分析(1/2)
5.5.3. ボールスクリュー - 部品と技術分析(2/2)
5.5.4. プラネタリーローラースクリュー - 概要と主要部品
5.5.5. プラネタリーローラースクリューの利点と欠点
5.5.6. プラネタリーローラースクリューの課題:大規模生産における高品質製造
5.5.7. プラネタリーローラースクリューの材料考慮点
5.5.8. テスラオプティマス:ローラースクリューとボールスクリュー
5.5.9. 重負荷作業向けスクリューの将来動向
5.6. ベアリング
5.6.1. ベアリングの概要
5.6.2. ベアリングの分類
5.6.3. ボールベアリングとローラーベアリングの比較
5.7. センサー - カメラ、LiDAR、レーダー、超音波センサー
5.7.1. 周辺環境を検知する3D視覚システム
5.7.2. 事例:テスラ・オプティマス・カメラ
5.7.3. 事例:UBTechのWalker S1(マルチカメラ搭載)
5.7.4. 事例:UBTechのWalker X(マルチカメラと超音波センサー搭載)
5.7.5. 事例:ボストン・ダイナミクス:LiDAR、深度センサー、およびRGBカメラ
5.7.6. 純粋なカメラかLiDAR + カメラソリューションか?
5.7.7. 展望:ヒューマノイドロボットにおけるカメラとLiDAR
5.7.8. LiDAR、カメラ、および1D/3D超音波センサーの比較
5.7.9. LiDAR、カメラ、および超音波センサーの比較 - (1)
5.7.10. LiDAR、カメラ、および超音波センサーの比較 - (2)
5.7.11. ヒューマノイドロボットにおけるLiDARのコストと技術分析
5.7.12. ヒューマノイドにおけるLiDARの必要性と分類
5.7.13. LiDARのコスト内訳とスキャン方法
5.7.14. mmWaveレーダー
5.8. 触覚センサー
5.8.1. 触覚センサー - センサーの背後にある技術の概要
5.8.2. 触覚センサー - ヒューマノイドロボット工学における高価値コンポーネント
5.8.3. 技術別触覚センサーのベンチマーク
5.8.4. ユースケース:サンクチュアリ.AIのフェニックス汎用ロボットへの触覚センサーの応用
5.8.5. ユースケース:6D触覚/力センサーをTeslaのOptimusに搭載
5.8.6. Paxini - ヒューマノイドロボットの指用触覚センサー
5.8.7. Paxiniの触覚センサーと伝統的な触覚センサーの比較
5.8.8. UnitreeはNexdorとHanweiの触覚センサーを採用
5.8.9. Gelsight - Digit:手のためのカメラベースの触覚センサー
5.8.10. 柔軟な触覚センサーがトレンドだが、技術的・材料的な課題が残る
5.8.11. 手と足における触覚センシング
5.8.12. 身体における触覚センシングと電子皮膚
5.8.13. 触覚センサーと電子皮膚の課題
5.8.14. 触覚センサーの要約
5.9. ソフトウェア、AI、チップ
5.9.1. AIハードウェアとソフトウェアの導入
5.9.2. ソフトウェアと機能の要約
5.9.3. ソフトウェア - シミュレーション/トレーニング環境と知覚/センシング
5.9.4. ソフトウェア - 運動計画と制御
5.9.5. ソフトウェア - 基礎モデル
5.9.6. トレーニングデータの不足 - AIの課題 - 合成データ生成
5.9.7. Nvidia Isaac GR00T - 合成データ生成
5.9.8. ヒューマノイドロボットのためのマルチコンタクト計画と制御
5.10. 充電用のバッテリーとパワーエレクトロニクス
5.10.1. ヒューマノイドのバッテリー - パラメーター比較
5.10.2. バッテリーの課題
5.10.3. バッテリーの持続時間制限 - 急速充電またはバッテリー交換 - 熱管理の課題と潜在的な解決策
5.10.4. 4時間連続運転可能な交換式バッテリー
5.10.5. ヒューマノイドにおけるバッテリーの展望
5.10.6. 産業用アプリケーションにおけるヒューマノイドロボット1台あたりのバッテリー容量の予測:2025-2045
5.11. 高機能素材
5.11.1. 形状金属合金
5.11.2. マグネシウム合金 - 軽量ヒューマノイドロボットのトレンド
5.11.3. マグネシウム合金の技術的課題とホンダのASIMO
5.11.4. PEEK - コストと技術特性
5.11.5. ヒューマノイドロボット部品におけるPEEKの用途
5.11.6. ヒューマノイドロボットにおけるPEEKの課題と市場展望
5.11.7. ヒューマノイドに使用可能な市販のPEEK材料
5.11.8. PEEK、アルミニウム、マグネシウム合金の材料性能比較
5.11.9. NdFeB-希土類永久磁石
5.11.10. 希土類金属は電気自動車によく使用され、人型ロボット産業へのサプライチェーンの相乗効果につながる。
5.11.11. 超高分子量ポリエチレン(UHMWPE)
5.11.12. ヒューマノイドロボット用鉄鋼材料 - オプティマスに必要な材料の種類ごとの推定重量要件
5.11.13. ヒューマノイドロボット用材料の嗜好性のまとめ
5.12. アームエフェクター
5.12.1. ヒューマノイドのアームエフェクターのポイント
5.12.2. ホットスワップ可能なアーム・エフェクター
5.12.3. ヒューマノイドの手の技術的障壁
5.12.4. ヒューマノイドの手の作動方法
6. 市場予測と将来動向
6.1. 自動車産業におけるヒューマノイドロボットの市場規模予測:2025年~2035年
6.2. 自動車産業におけるヒューマノイドロボットの台数予測:2025年~2035年
6.3. 物流・倉庫業界におけるヒューマノイドロボット台数予測:2025~2035年
6.4. 物流・倉庫業界におけるヒューマノイドロボットの市場規模予測:2025年~2035年
6.5. ヒューマノイドロボットのコスト予測:2025~2035年
6.6. 産業用ヒューマノイドロボットのバッテリー容量(GWh)予測:2025年~2035年
6.7. ヒューマノイドロボットのハードウェア部品数量予測 2025-2035
6.8. ヒューマノイドロボットハードウェア部品市場規模予測 2025-2035
7. プロファイル

Summary
Humanoid Robots 2025-2035: Technologies, Markets and Opportunities
10-year humanoid robot market forecasts for key automotive and logistics industry, 10-year market forecast of humanoids components (batteries, actuators, motors, screws, sensors, etc.). Key players, news and timeline, adoption barriers.
Humanoid robots are widely regarded as "Artificial Intelligence Embodied in the Real World," especially following the surge in AI advancements like ChatGPT over the past two years. From IDTechEx's research and analysis, the market has seen a surge in interest, with significant investments from flowing into leading startups such as Apptronik, Agility Robotics, Unitree, and Figure.AI. Further, massive players such as Tesla, Xiaomi, and Meta have also announced plans of getting into the humanoid robotics space.
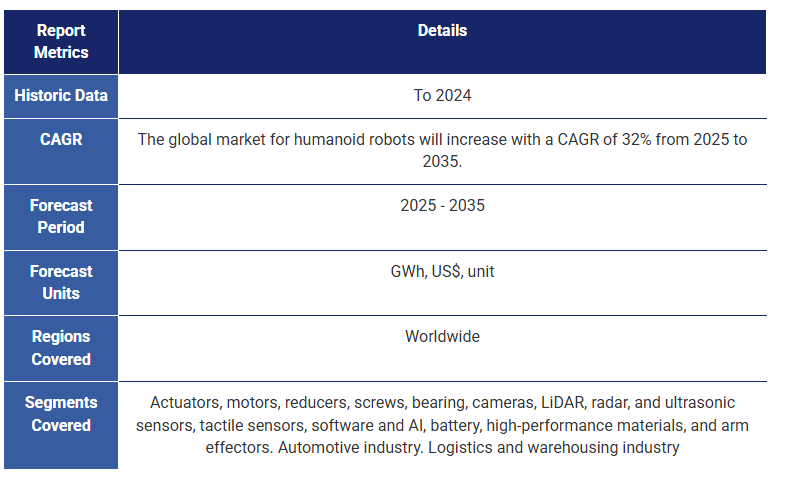
IDTechEx's report, "Humanoid Robots 2025-2035: Technology, Market, and Opportunity," offers an in-depth technical analysis at the component level, covering actuators, motors, reducers, screws, bearings, cameras, LiDAR, radar, ultrasonic sensors, tactile sensors, AI-driven software, batteries, high-performance materials, and end effectors. This report provides a comprehensive look at the technologies, existing humanoid robots, design and manufacturing challenges, business and regulatory hurdles, and future market potential for humanoid robots, with a particular focus on opportunities in the automotive and logistics industries.
Key insights from the report include:
Industrial Applications: Automotive and Warehousing/Logistics
As of 2025, despite significant hype around humanoid robots, there are still limited real-world applications where they fit in. While many OEMs market their humanoid robots as general-purpose machines, IDTechEx split the target use cases into two categories, including: industrial and non-industrial applications.
Industrial humanoid robots, such as Tesla Optimus, Agility Robotics' Digit, and UBTech's Walker S, are typically heavier and equipped with larger battery packs, whereas non-industrial humanoids, like Unitree's G1, are more lightweight and designed for research or light-duty tasks with lower force/torque requirements.
Among industrial applications, the automotive and logistics/warehousing sectors have attracted the most interest. In the short to mid-term (before 2030), the automotive industry is expected to lead humanoid adoption, driven by factors such as the historic success of automation, large-scale production demands, and stronger cost negotiation power due to the big volume needed. Several automotive OEMs are already developing their own humanoid robots, including Tesla, Xiaomi, and XPeng. With well-established supply chains that overlap significantly with humanoid robotics, car manufacturers can leverage existing resources to reduce costs.
Tesla has announced plans to produce 5,000 Optimus robots, with potential scaling to 12,000 units based on production and supply chain readiness. BYD aims to deploy 1,500 humanoid robots in 2025, with a target of scaling up to 20,000 by 2026. Other leading automotive players, such as Mercedes-Benz (partnering with Apptronik) and BMW (collaborating with Figure.AI on Figure 02), are also making strides in humanoid robotics. Despite some targets seeming very aggressive and slightly unrealistic given the current supply chain status, investments and rapid developments highlight the industry's confidence in the future potential of humanoid robots.
However, as of 2025, humanoids in the automotive sector are still in the early pilot testing phase, primarily performing basic tasks like badge labeling, material handling, and inspection. IDTechEx analysts anticipate that by 2026-2027, humanoid robots will start operating for specific use cases, gradually expanding to more complex tasks between 2028 and 2033. This also means that general-purposed humanoid robots in other non-industrial area, such as healthcare, are even further away.
The logistics and warehousing industry also show promise for humanoid adoption, though progress has been slower. As of early 2025, IDTechEx has observed only a limited number of pilot projects, with fewer than 100 humanoids deployed in warehouses. Given that warehouse testing typically takes about 18 to 30 months, large-scale adoption (thousands of units) is unlikely before end of 2025. Additionally, warehouse operators must evaluate the return on investment and payback period for humanoid robots-an aspect still under assessment due to limited real-world deployments. With these reasons, IDTechEx believes that 2026-2027 would be the time that humanoids in logistics start taking off, primarily due to the proven successes from humanoids in the automotive industry.
Nonetheless, IDTechEx suggests that if humanoid robot prices drop to around US$20,000 and they can efficiently transport goods and perform basic pick-and-place tasks, interest could increase. Currently, achieving the same functionality with an autonomous mobile robot (AMR) or automated guided vehicle (AGV) combined with a robotic arm would cost significantly more than US$20,000, making humanoid robots a more attractive alternative to combine these two functions together.
Component Challenges: Cost and Technical Hurdles
As of 2025, the average selling price of humanoid robots remains high. For instance, Tesla Optimus is estimated to cost between US$120,000 and US$150,000, largely due to expensive components and low production volumes. However, as production scales up, IDTechEx anticipates a steady decline in both component and overall humanoid costs.
Several technical and manufacturing challenges also persist at the component level. Key issues include:
Conclusion
While humanoid robots are still in their early stages of industrial deployment, their market potential is massive, especially in the automotive and logistics sectors. Significant investments, technological advancements, and increasing economies of scale are expected to drive rapid growth over the next decade. IDTechEx believes that the market size for humanoid robot will reach around US$30 billion by 2035, more details are in IDTechEx's latest research "Humanoid Robots 2025-2035: Technology, Market, and Opportunity".
Key Aspects
This report provides critical market intelligence about humanoid robots, focusing on their major applications and each component's technical, regulatory, and commercial challenges. This includes:
A review of state-of-the-art humanoids, their target industries, and adoption timeline.
Full analysis of each hardware component of the humanoid robot
Market size forecast and business opportunities throughout
Table of Contents1. EXECUTIVE SUMMARY
1.1. Pain Points and Trends of Humanoid Robots
1.2. Choice of components - cost-efficiency is the key?
1.3. Component trend - modularity, efficient materials, and power efficiency
1.4. Trend: Cost Reduction With Volume Upscaling and Universal Tasks
1.5. Summary of humanoid robots
1.6. Maturity of commercialization of humanoid robots by application
1.7. Summary of critical hardware components in humanoid robots
1.8. Actuator - technical comparison and challenges
1.9. Summary of motors
1.10. Benchmarking reducers
1.11. 3D visual systems to sense surroundings
1.12. Benchmarking tactile sensors by technology
1.13. Cost analysis by component
1.14. Summary of software and functions
1.15. Humanoids market by country and primary use-case
1.16. Benefits and challenges of humanoid robots in the logistics industry
1.17. Estimated timeline of tasks handled by humanoid robots in the logistics industry
1.18. Humanoid robot tasks in the automotive industry: near established vs. emerging applications
1.19. Ambitious goals of humanoid deployment from BYD and Tesla
1.20. Technical Challenges for Humanoid Robots in the Automotive Industry
1.21. Commercial and regulatory challenges for humanoids in automotive industry
1.22. Market size and volume forecast of humanoid robots in the automotive and logistics industry
1.23. Battery capacity (GWh) forecast for humanoid robots used for industries: 2025-2035
1.24. Humanoid robot hardware component volume forecast: 2025-2035
1.25. Humanoid robot hardware component market size forecast: 2025-2035
2. INTRODUCTION
2.1. Humanoid Robotics Overview
2.2. Why humanoid robots and what is the difference between humanoid robots and specialized robots?
2.3. What is accelerating the adoption of humanoid robots?
2.4. What is holding back the adoption of humanoid robots?
2.5. Over 1 billion humanoid robots by 2040 - Comments from Elon Musk
2.6. A fast-growing humanoid robotics industry
2.7. Leading players enter the space of humanoid robotics
2.8. Key catalyst events summary
2.9. Cosmos and Nvidia's Isaac GR00T
2.10. Synergies between automotive industry and humanoid robotics industry
2.11. Cost analysis - Optimus (1/2)
2.12. Cost analysis - Optimus (2/2)
2.13. Partnerships and adoption
3. MAJOR CUSTOMERS AND USE CASES
3.1. Overview
3.1.1. Sectors that most likely to adopt humanoid robot (1/2)
3.1.2. Sectors that most likely to adopt humanoid robot (2/2) - fast growth in 2024
3.1.3. Humanoids market by country and primary use-case
3.1.4. Maturity of commercialization of humanoid robots by application
3.1.5. Summary of humanoid robots (1/3)
3.1.6. Summary of humanoid robots (2/3)
3.1.7. Summary of humanoid robots (3/3)
3.2. Automotive industry
3.2.1. Automotive industry - collaborations (1/2)
3.2.2. Automotive industry - collaborations (2/2)
3.2.3. Humanoid robots and automotive OEMs (1/2)
3.2.4. Humanoid robots and automotive OEMs (2/2)
3.2.5. Tasks of humanoid robots in automotive industry
3.2.6. Automotive - UBTech's humanoids used for materials handling at BYD
3.2.7. Automotive - Nio uses UBTech's humanoid doing pilot operation at factories
3.2.8. Zeekr also followed Nio to deploy UBTech's humanoids in their factories
3.2.9. Figure AI's Figure 02 works with BMW
3.2.10. Apptronik's Apollo with Mercedes-Benz
3.2.11. Humanoid Robot Tasks in the Automotive Industry: Near Established vs. Emerging Applications
3.2.12. Ambitious goals of humanoids deployment from BYD and Tesla
3.2.13. Technical Challenges for Humanoid Robots in the Automotive Industry
3.2.14. Commercial and regulatory challenges for humanoids in automotive industry
3.2.15. Opportunities for humanoids in automotive industry
3.3. Logistics industry
3.3.1. Introduction to humanoid robots in logistics industry
3.3.2. Benefits and challenges of humanoid robots in the logistics industry
3.3.3. Agility Robotics - Leading Humanoid Robot Player in the Logistics Industry
3.3.4. Cooperative area for humanoid robots used in warehouses - safety challenge
3.3.5. BYD - UBTech's last mile delivery with humanoid robots
3.3.6. GXO and Apptronik
3.3.7. Figure's Helix: Humanoid Robotics in Logistics
3.3.8. Estimated timeline of tasks handled by humanoid robots in the logistics industry
3.4. News and players involved in humanoid robotics industry
3.4.1. Meta getting into humanoid robot
3.4.2. Nvidia's Humanoid Robot Technologies
3.4.3. Cosmos and Nvidia's Isaac GR00T
3.4.4. Apptronik raised US$350 million in series A funding
4. DESIGN, MANUFACTURING, AND COMMERCIAL CHALLENGES
4.1. Summary of challenges
4.1.1. Design and manufacturing challenges (1/3) - Summary
4.1.2. Design and manufacturing challenges (2/3) - Summary
4.1.3. Design and manufacturing challenges (3/3) - Summary
4.1.4. Commercial and social barriers for adopting humanoid robots
4.1.5. Challenges around humanoid robot integration
4.1.6. UniTree
4.1.7. Manus - MetaGloves for Hand-Tracking for Motion Capture
4.2. Design and manufacturing challenges
4.2.1. Design and manufacturing challenges - actuators (motors + reducers)
4.2.2. Design and manufacturing challenges - reducers
4.2.3. Design and manufacturing challenges - motors and thermal management (1/2)
4.2.4. Design and manufacturing challenges - motors and thermal management (2/2)
4.2.5. Design and manufacturing challenges - batteries and cooling
4.2.6. Design, manufacturing, and commercial challenges - tactile sensors
4.3. Regulatory and commercial challenges
4.3.1. Concerns: safety, regulation, and data privacy
4.3.2. How to work around safety and regulatory requirement - cooperative space for industrial settings
4.3.3. Lack of enough evidence to prove the return on investment
4.3.4. Regional regulations for humanoid robots
5. COMPONENT LEVEL ANALYSIS
5.1. Overview
5.1.1. Component summary of humanoid models
5.1.2. Summary of critical components in humanoid robots
5.1.3. Cost analysis by component
5.1.4. Component overview - Tesla Optimus
5.1.5. Component overview - Unitree G1
5.2. Actuators Overview
5.2.1. Actuators - introduction
5.2.2. Actuators - componentry level split
5.2.3. Actuators categorization: linear and rotary
5.2.4. Linear and rotary actuators and their pros and cons
5.2.5. Linear and rotary actuators and their applications in humanoids' joints
5.2.6. Actuator categorization: electric, pneumatic and hydraulic
5.2.7. Actuator - technical comparison and challenges
5.2.8. Actuation: direct drive or geared setting?
5.3. Motors
5.3.1. Electric motors are getting increasingly popular
5.3.2. A summary of motors for different humanoid robotics companies
5.3.3. Direct drive motors - frameless motors
5.3.4. Frameless motors - can be used for direct drive actuator or geared actuation
5.3.5. Brushed/Brushless motors
5.3.6. Coreless motors - type of brushed motors
5.3.7. Benefits and drawbacks of coreless motors
5.3.8. Summary of motors
5.3.9. Use case: Tesla Optimus motors
5.4. Reducers
5.4.1. Reducer Overview: Harmonic, Planetary, and RV Reducers
5.4.2. Benchmarking Reducers (1/2)
5.4.3. Benchmarking Reducers (2/2)
5.4.4. Harmonic reducer
5.4.5. Design, manufacturing and material challenges of harmonic reducers
5.4.6. RV Reducer
5.4.7. Design, manufacturing and material challenges of RV reducers
5.4.8. Planetary reducer
5.4.9. Thermal management challenges of planetary reducers
5.4.10. Design and manufacturing challenges of planetary reducers
5.4.11. Use cases: Tesla Optimus
5.5. Screws
5.5.1. Introduction to different types of screws
5.5.2. Ball screws - component and technical analysis (1/2)
5.5.3. Ball screws - component and technical analysis (2/2)
5.5.4. Planetary roller screws - introduction and key components
5.5.5. Planetary roller screws benefits and drawbacks
5.5.6. Challenge of planetary roller screws: manufacturing with high quality at large scale
5.5.7. Material considerations of planetary roller screws
5.5.8. Tesla Optimus: roller screws and ball screws
5.5.9. Future trend of screws for heavy-duty tasks
5.6. Bearing
5.6.1. Introduction to bearings
5.6.2. Categorization of bearings
5.6.3. Comparison of ball bearing and roller bearing
5.7. Sensors - cameras, LiDAR, radar, and ultrasonic sensors
5.7.1. 3D visual systems to sense the surroundings
5.7.2. Use Case: Tesla Optimus Camera
5.7.3. Use Case: UBTech's Walker S1 with multi-cameras
5.7.4. Use Case: UBTech's Walker X with multi-cameras and ultrasonic sensors
5.7.5. Use Case: Boston Dynamics: LiDAR, depth sensor and RGB camera
5.7.6. Pure Camera or LiDAR + Camera Solution?
5.7.7. Outlook: cameras and LiDAR in humanoid robots
5.7.8. Comparison of LiDAR, cameras, and 1D/3D ultrasonic sensors
5.7.9. Comparisons of LiDAR, camera & ultrasonic sensors - (1)
5.7.10. Comparisons of LiDAR, camera & ultrasonic sensors - (2)
5.7.11. LiDAR costs and technical analysis for uses in humanoid robots
5.7.12. Necessity and categorization of LiDAR in humanoids
5.7.13. LiDAR cost breakdown and scanning methods
5.7.14. mmWave Radar
5.8. Tactile Sensors
5.8.1. Tactile sensors - introduction to the technologies behind the sensors
5.8.2. Tactile sensors - high value components for humanoid robotics
5.8.3. Benchmarking tactile sensors by technology
5.8.4. Use Case: Tactile Sensors into Sanctuary.AI's Phoenix General Purpose Robots
5.8.5. Use Case: 6D Tactile/Force Sensors into Tesla's Optimus
5.8.6. Paxini - Tactile sensors for humanoid robot fingers
5.8.7. Comparison of Paxini's tactile sensors with traditional tactile sensors
5.8.8. Unitree uses Nexdor and Hanwei's tactile sensors
5.8.9. Gelsight - Digit: camera-based tactile sensor for hands
5.8.10. Flexible tactile is the trend, however, technical and material challenges remain
5.8.11. Tactile sensing on hands and feet
5.8.12. Tactile sensing and e-skins on body
5.8.13. Challenges of tactile sensors and electronic skins
5.8.14. Summary of tactile sensors
5.9. Software, AI and Chips
5.9.1. AI hardware and software introduction
5.9.2. Summary of software and functions
5.9.3. Software - Simulation/training environments and perception/sensing
5.9.4. Software - motion planning and control
5.9.5. Software - foundation model
5.9.6. Lack of training data - pain points of AI - synthetic data generation
5.9.7. Nvidia Isaac GR00T - synthetic data generation
5.9.8. Multi-contact planning and control for humanoid robots
5.10. Batteries and power electronics for charging
5.10.1. Humanoid's batteries - parameters comparison
5.10.2. Challenges of batteries
5.10.3. Limited battery endurance - fast charging or battery swapping - thermal management challenges and potential solutions
5.10.4. Swappable battery that runs for four hours continuously
5.10.5. Outlook for batteries in humanoids
5.10.6. Battery capacity per humanoid robot for industrial applications forecast: 2025-2045
5.11. High-performance materials
5.11.1. Shape Metal Alloys
5.11.2. Magnesium alloy - trend towards lightweight humanoid robot
5.11.3. Technical challenges of magnesium alloy and Honda's ASIMO
5.11.4. PEEK - costs and technical properties
5.11.5. Applications of PEEK in Humanoid Robot Components
5.11.6. Challenges and market outlook for PEEK in humanoid robots
5.11.7. Commercial PEEK materials that can be used for humanoids
5.11.8. Material performance comparison of PEEK, aluminum and magnesium alloy
5.11.9. NdFeB - rare earth permanent magnets
5.11.10. Rare earth metals are commonly used in electric vehicles, leading to supply chain synergies to humanoid robotics industry
5.11.11. Ultra High Molecular Weight Polyethylene (UHMWPE)
5.11.12. Steel materials for humanoid robots - estimated gravimetric requirement per type of material for Optimus
5.11.13. Summary of material preference for humanoid robot
5.12. Arm Effectors
5.12.1. Key points of humanoid's arm effectors
5.12.2. Hot swappable arm effectors
5.12.3. Technical barriers of humanoid's hands
5.12.4. Actuation methods of humanoid's hands
6. MARKET FORECASTS AND FUTURE TRENDS
6.1. Market size forecast of humanoid robots in the automotive industry: 2025-2035
6.2. Volume forecast of humanoid robots in the automotive industry: 2025-2035
6.3. Volume forecast of humanoid robots in the logistics and warehousing industry: 2025-2035
6.4. Market size forecast of humanoid robots in the logistics and warehousing industry: 2025-2035
6.5. Cost forecast of humanoid robot: 2025-2035
6.6. Battery capacity (GWh) forecast for humanoid robots used for industries: 2025-2035
6.7. Humanoid robot hardware component volume forecast: 2025-2035
6.8. Humanoid robot hardware component market size forecast: 2025-2035
7. PROFILES
ご注文は、お電話またはWEBから承ります。お見積もりの作成もお気軽にご相談ください。本レポートと同分野(ロボット)の最新刊レポート
IDTechEx社の ロボティクスと自律性 - Robotics & Autonomy 分野 での最新刊レポート
よくあるご質問IDTechEx社はどのような調査会社ですか?IDTechExはセンサ技術や3D印刷、電気自動車などの先端技術・材料市場を対象に広範かつ詳細な調査を行っています。データリソースはIDTechExの調査レポートおよび委託調査(個別調査)を取り扱う日... もっと見る 調査レポートの納品までの日数はどの程度ですか?在庫のあるものは速納となりますが、平均的には 3-4日と見て下さい。
注文の手続きはどのようになっていますか?1)お客様からの御問い合わせをいただきます。
お支払方法の方法はどのようになっていますか?納品と同時にデータリソース社よりお客様へ請求書(必要に応じて納品書も)を発送いたします。
データリソース社はどのような会社ですか?当社は、世界各国の主要調査会社・レポート出版社と提携し、世界各国の市場調査レポートや技術動向レポートなどを日本国内の企業・公官庁及び教育研究機関に提供しております。
|
|

